

Inertron is a mass properties measurement device. It accurately computes mass , center of gravity, moments and products of inertia (MCI). In less than a few minutes rather than several days for classic methods.
- Accuracy: 0.1% of sensor’s full scale
- Easily scalable up or down: 10kg, 100kg, 1000kg, 10 000kg
- Easy to move close to object
- Plug and play (230V)
Principles


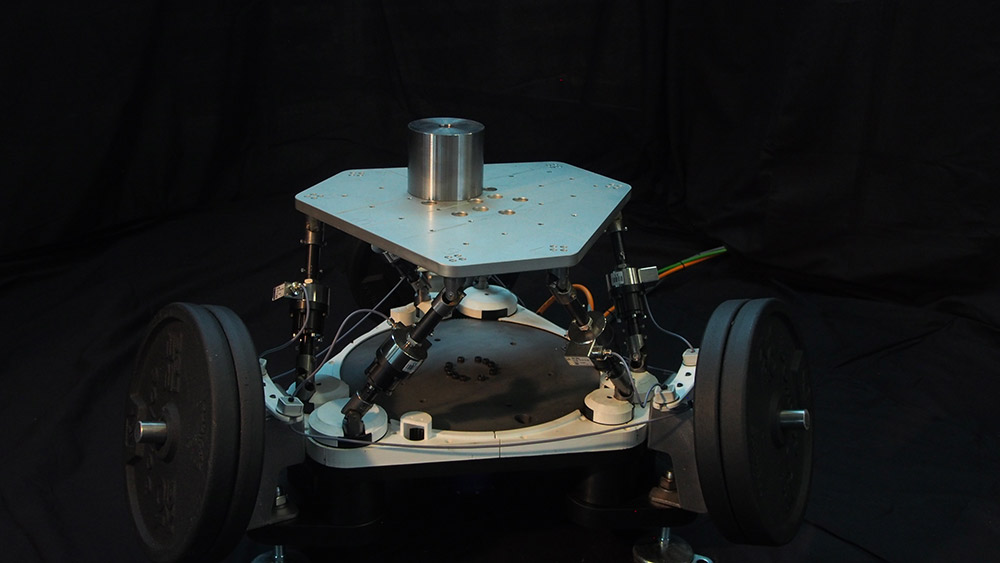
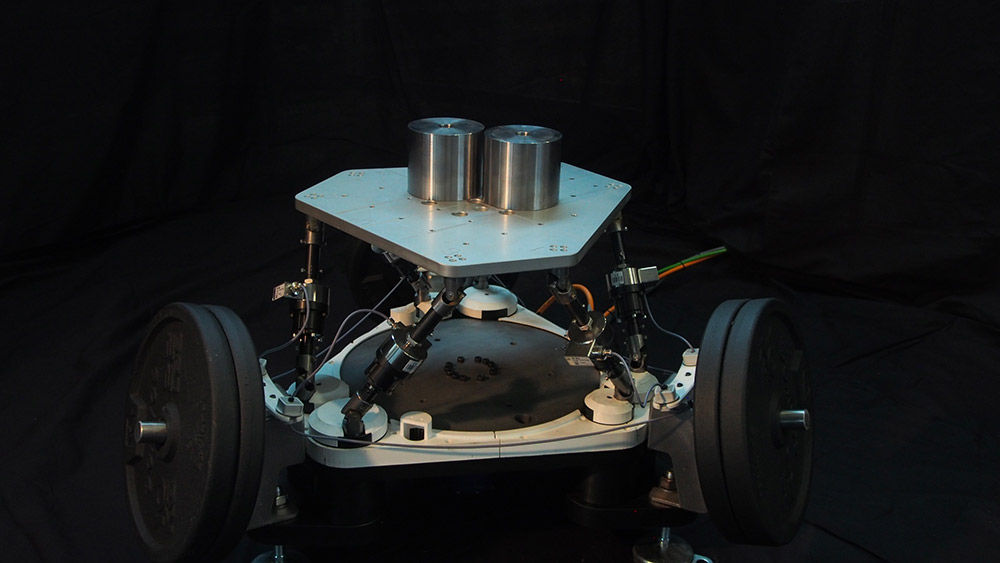
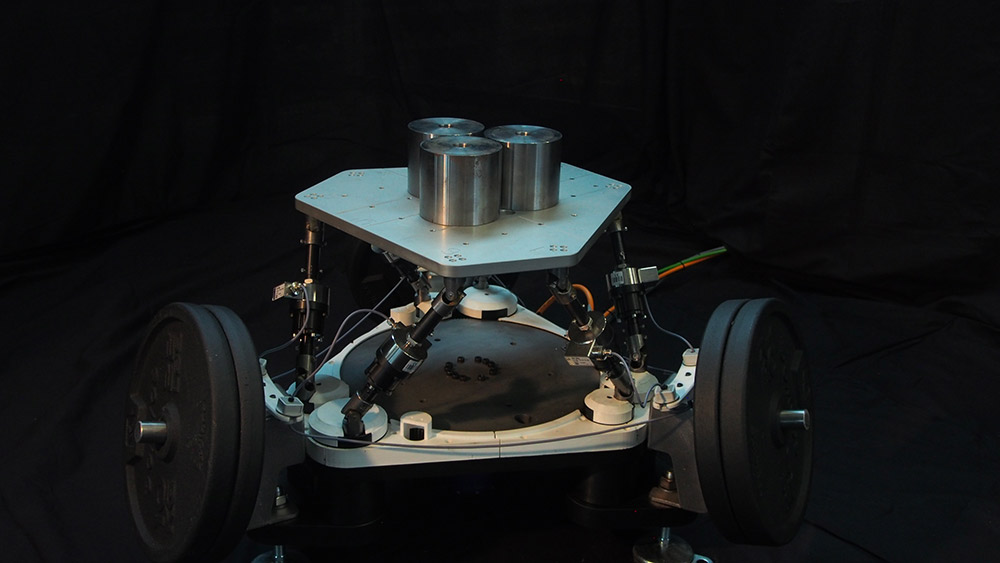
A top plate stands on a hexapod which legs are attached to eccentric gears linked together by a central gear.
The object to measure is clamped to the plate.
The central gear is driven by a single motor, creating a totally reproductible periodic kinematic.
The 6 hexapod legs carry axial force transducers which measurements are sampled on pre defined positions during each cycle.
For each angular position:
- The 6 force sensors allow to compute the plate and object forces torsor
- T = P + a . v² . MCI where
- P is the weight torsor
- a . v². MCI is the Inertia torsor , proportional to MCI and square v as of angular speed
Measuring T for 2 different angular speeds, P and MCI can be computed
Measurement only takes a few minutes. It yields the complete object MCI:
- Mass
- Center of gravity coordinates in plate’s referential
- Inertia matrix : complete with moments and products
A specific interface between the plate and the object may be necessary. In which case, a deadweight measurement with the interface but no object can be subtracted from the complete measurement
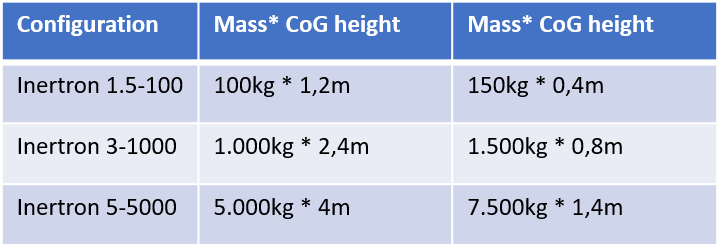
- Inertron is equipped with geometry and force sensors that define the product limit: mass of the object * height of its center of gravity.
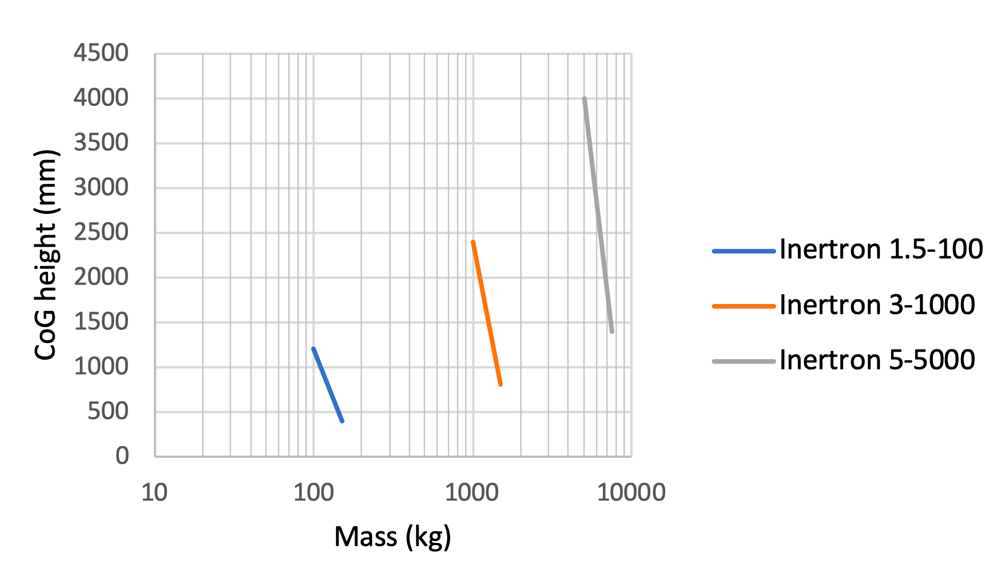
- We offer three standard configurations: Inertron 1.5-100, Inertron 3-1000 and Inertron 5-5000.
- For each standard configuration, two operating points are given as an example which allow the full scale of the force sensors to be used:


- For each configuration, it is possible to reduce the capacity of the sensors if better precision is desired for lower masses.
- Inertron ensures a very good relative accuracy for masses 10 times lighter than maximal masses of each configuration
- For other masses or heights of CDG, a personalized definition is possible on specifications.

Measurement accuracy
- 240 samples per cycle for each of the 6 transducers
- Automatic angular speed adjustement to maximize transducer’s range usage without overload:
- Low for heavy objects
- High for light objects
E.g:
- 2 rotational speed setpoints each with 10 cycles = 240x6x2x10 = 28 800 recorded force values
- Each MCI is a linear combination of all the measured forces
- The signal to noise ratio is thus improved by two orders of magnitude ( 20dB)
- The measurement principle automatically filters out solid and aerodynamic friction
Accuracy:
- 0.1% of sensors ’ full scale
-
Successive measurements of reference object configurations over the measuring range are used to calibrate the device.
-
By measuring the largest possible set of reference object configurations, we can:
-
Check forces to MCI linearity
- Compute uncertainty of measured MCI, allowing Inertron accuracy evaluation
-



Key features
- Dimensions are proportional to measured object (weight)
- Easily scalable up or down: 10 / 100 / 1.000 / 10.000 kg
- Inertron can operate upside down to measure objects held from the top
- All axes in a single measurement
- Smaller models can easily move to the object to measure and are powered v i a single 230V socket

- Significantly reduced measurement time
- Failed transducers: Inertron can still run with a slightly degraded accuracy E.g.: 2 failed transducers over 6 ~ 20 % accuracy loss
- Continuous signal analysis allows backlash detection
- No risk to tested object
- Patented, designed, manufactured and maintained in France


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}